R&D platform „Eduard“

Introducing our advanced mobile robot platform designed specifically for
research, development and product verification. This system of- fers
extensive hardware and software expansion capabilities, with components
designed to provide countless interface options and configurations.
Whether you want to test new sensor systems or enhance your software
capabilities, our mobile robot platform has you covered. Programming the
robot is flexible and allows multiple approaches. The typical method
involves extending the ROS1 or ROS2 setup with nodes written in either
Python or C++. These nodes can be self- coded or installed directly from
the rich repository of the open source community. In addition, NodeRED,
a graphical low-code JavaScript environment, provides access to the
robot‘s built-in sensors and actuators. Our platform is designed for
developers of all skill levels and promotes broad software compatibility
across multiple entry points.
Enquire
tech specs
Download Technical Dataconfigurations
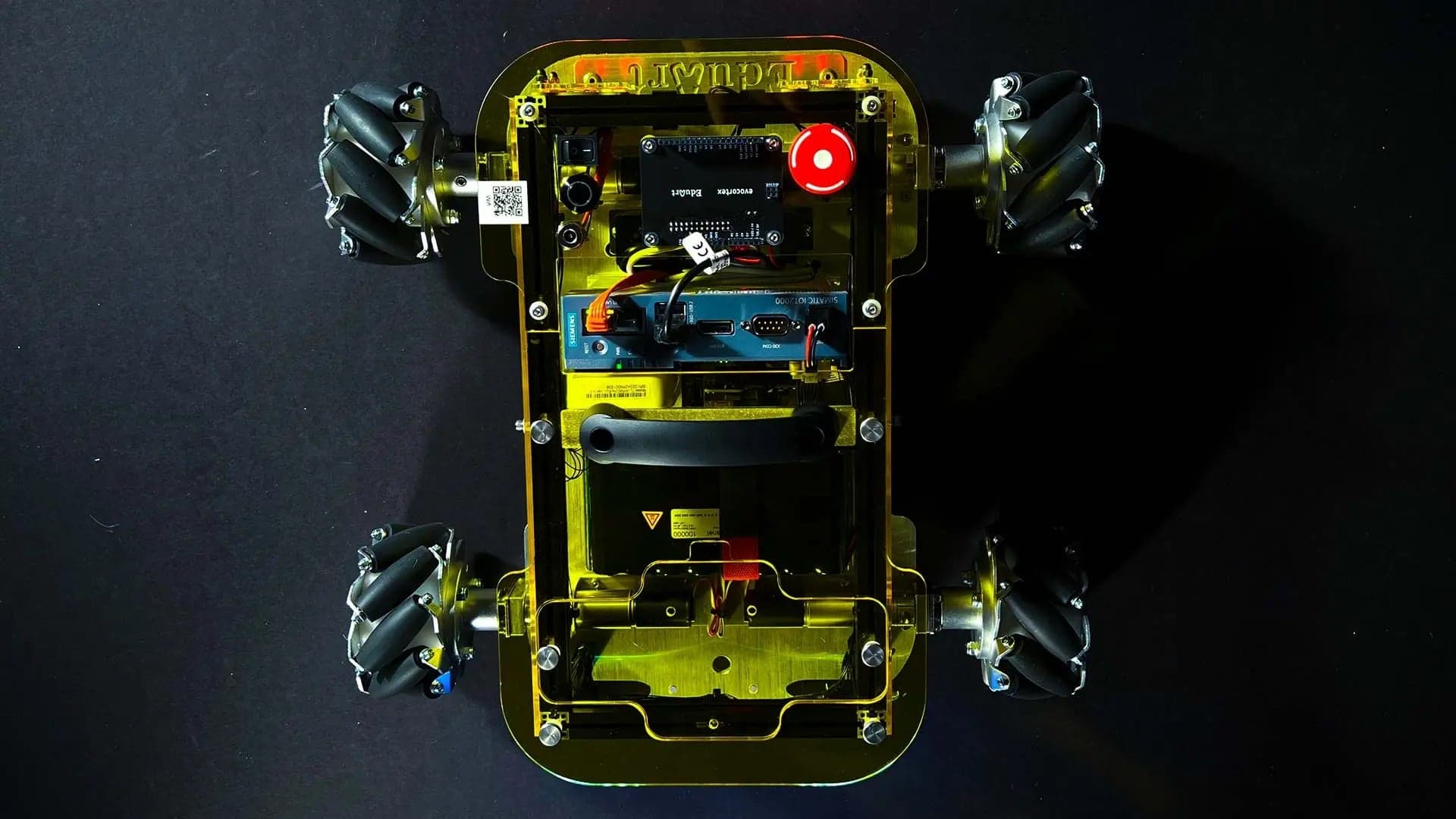
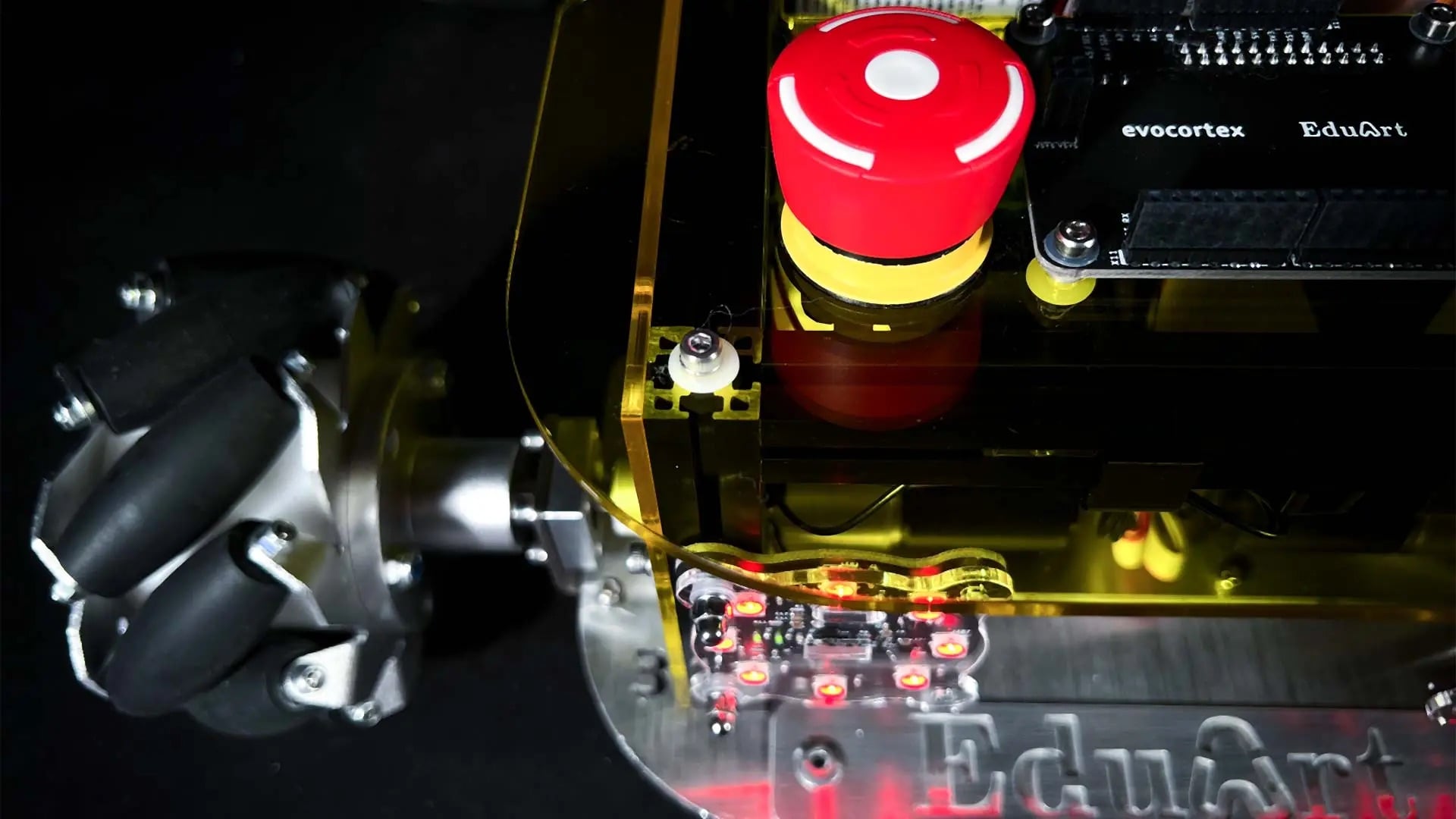
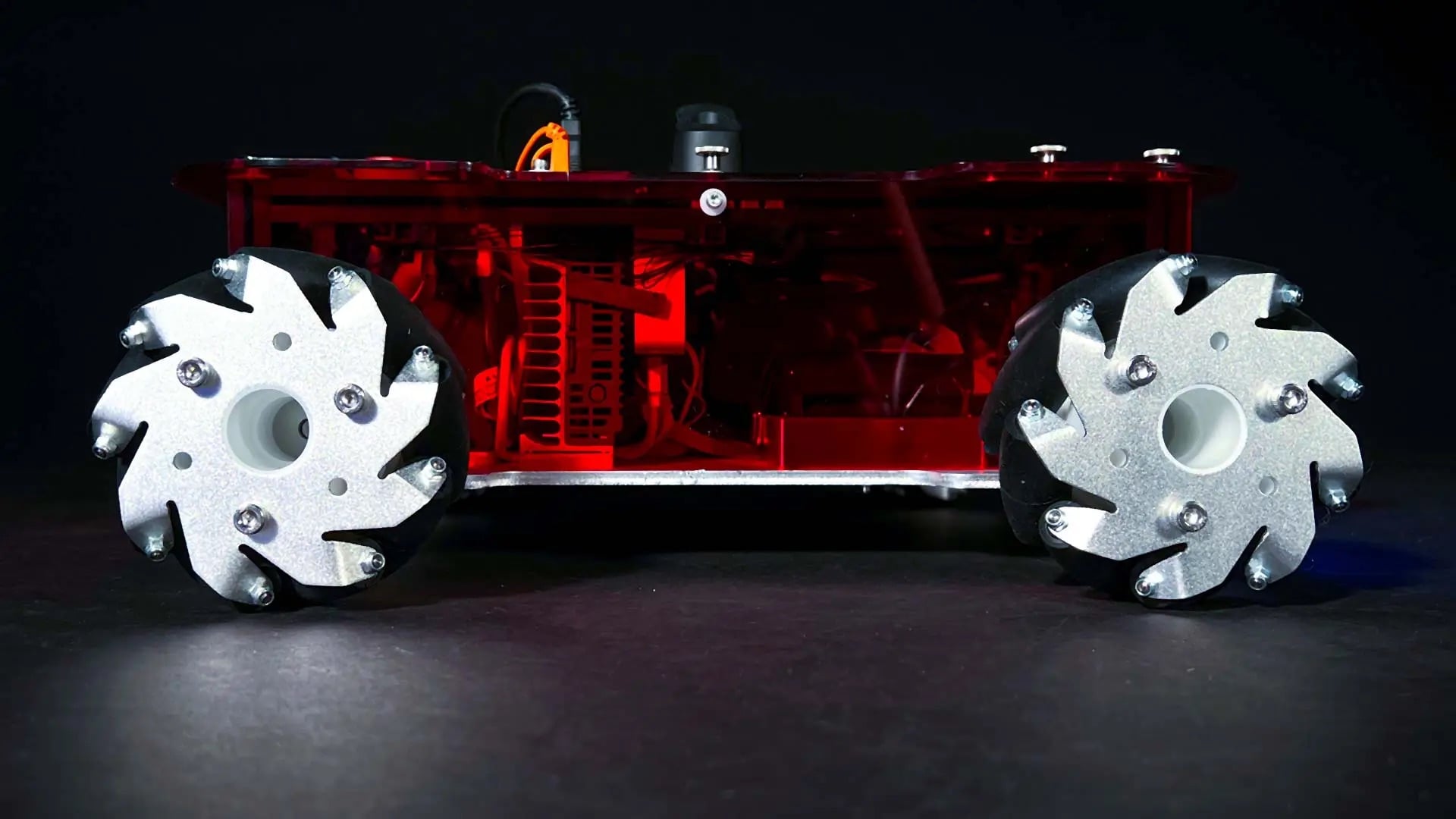
Eduard is highly customizable, making it the ideal platform for a wide range of research and application scenarios. It supports seamless integration of various sensors and hardware modules, including robotic arms, multiple LIDAR models, or even touchscreen tablets for interactive use cases. This flexibility allows Eduard to serve not only as a research tool but also as a demonstration or exhibition robot in trade shows, public spaces, or museums. Thanks to its extensive array of interface ports and mounting points, you can easily attach your preferred components—no matter how unique your setup may be.
Whether you want to configure Eduard yourself or prefer to have it pre-assembled and ready-to-deploy, we offer full customization support during the ordering process. This ensures that Eduard arrives exactly as you need it, saving you time and effort while maintaining the freedom to adapt or expand the system later. Click on the hotspots to see the features of the Eduard robot.
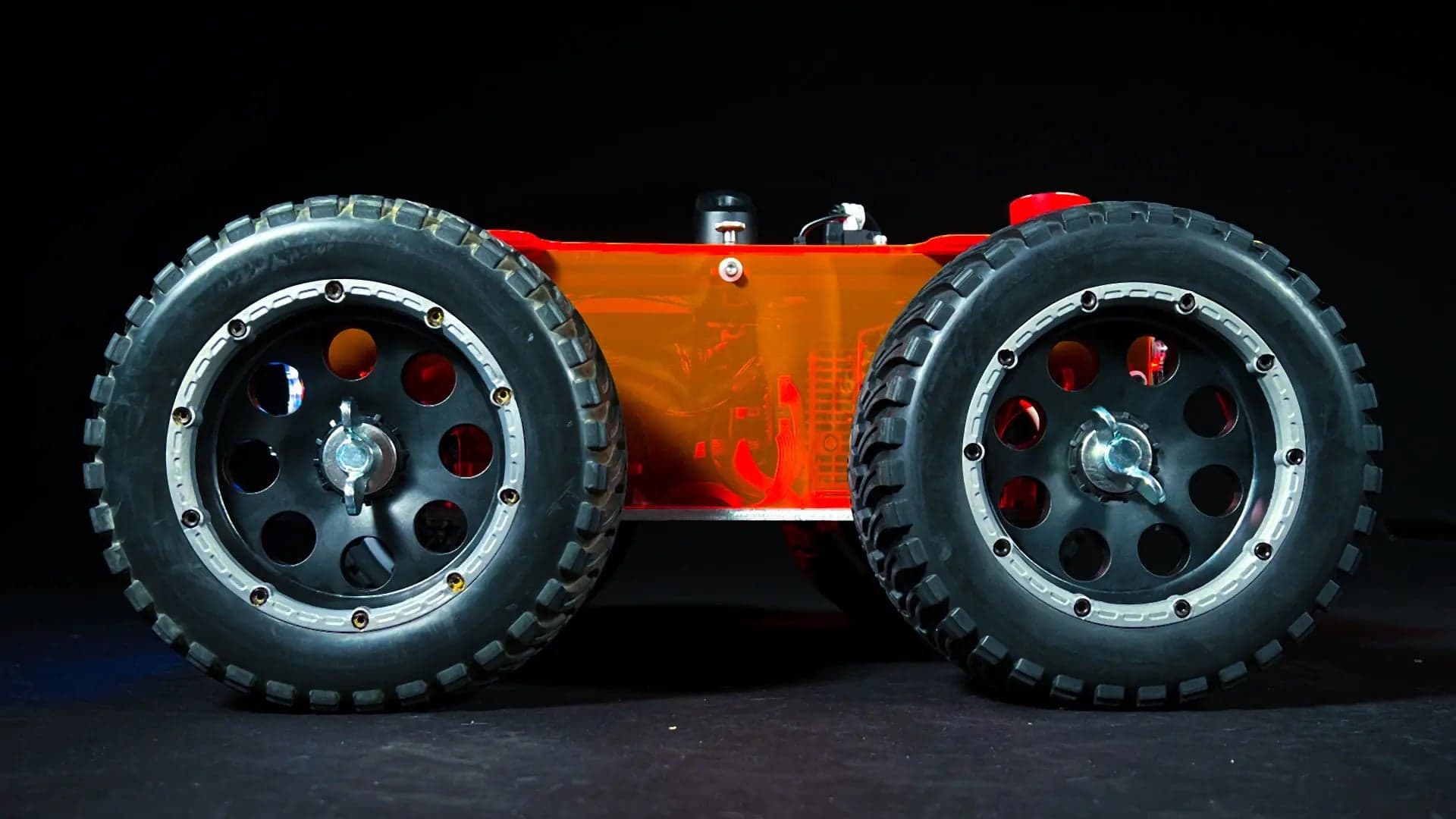
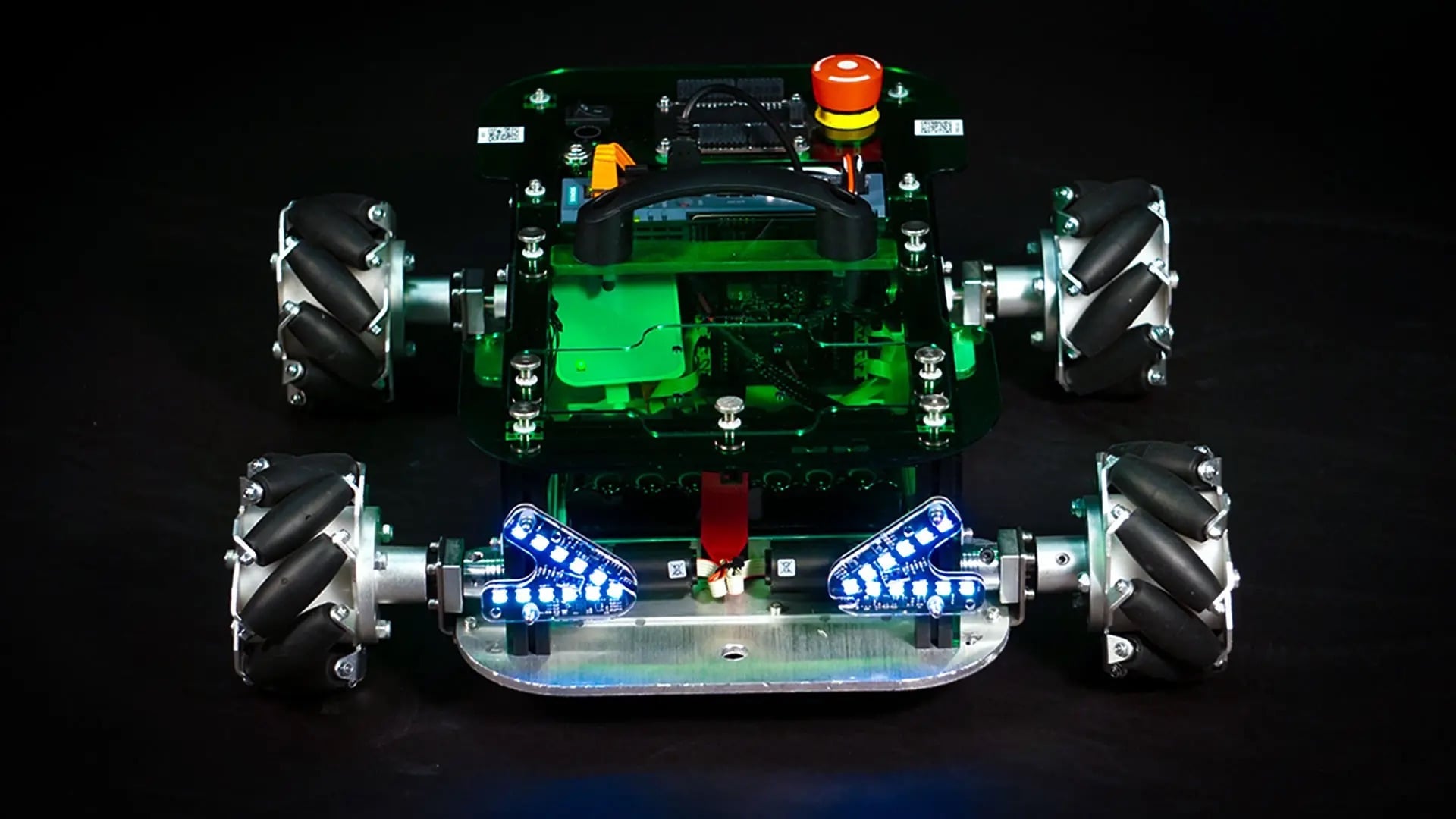
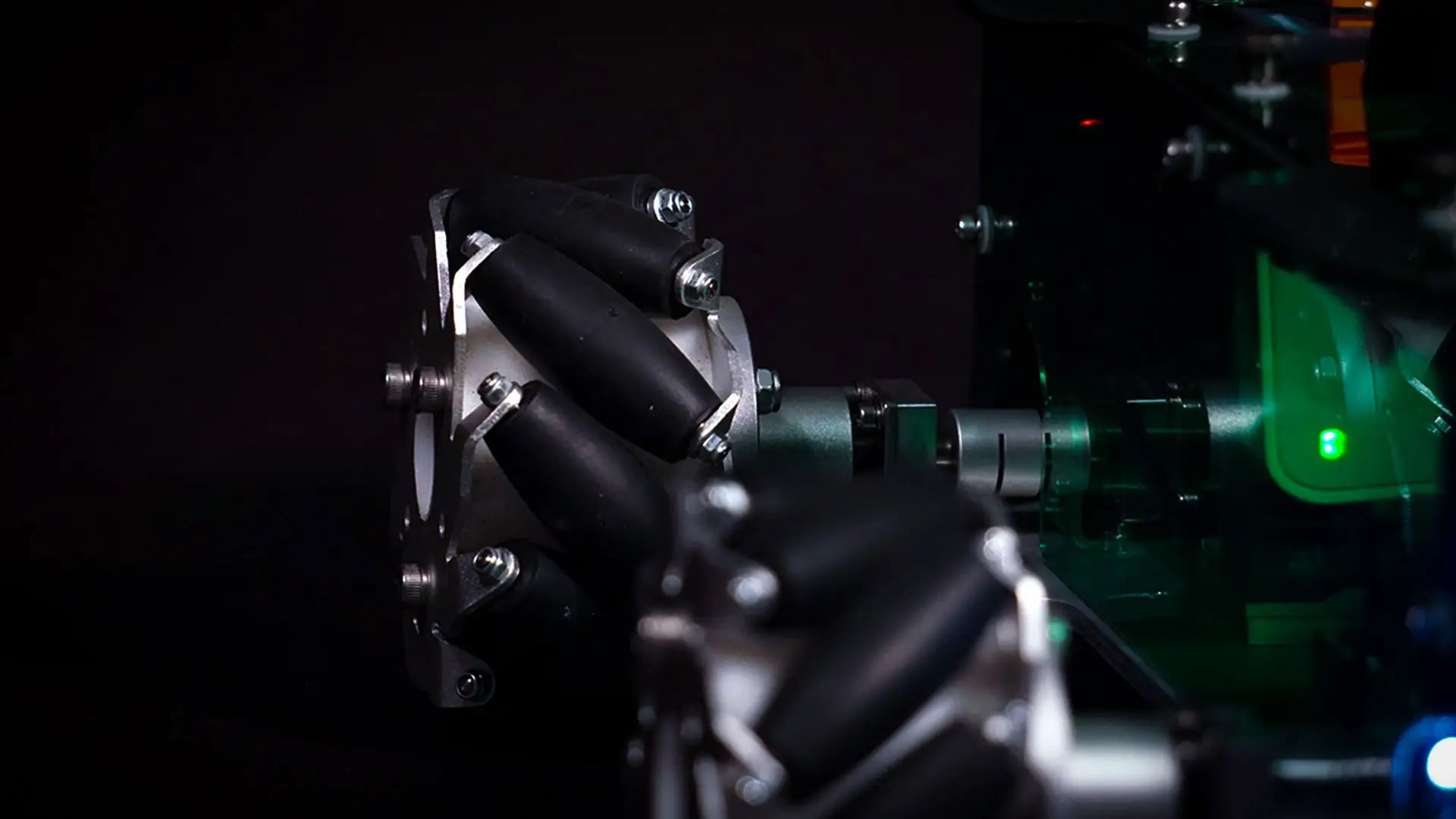
offroad –
or mechanum?
At Eduard, changing wheels is incredibly fast and effortless – just
a few simple steps, and your robot is ready for a new environment.
This quick-swap system allows seamless transitions between different
terrains without time-consuming modifications.
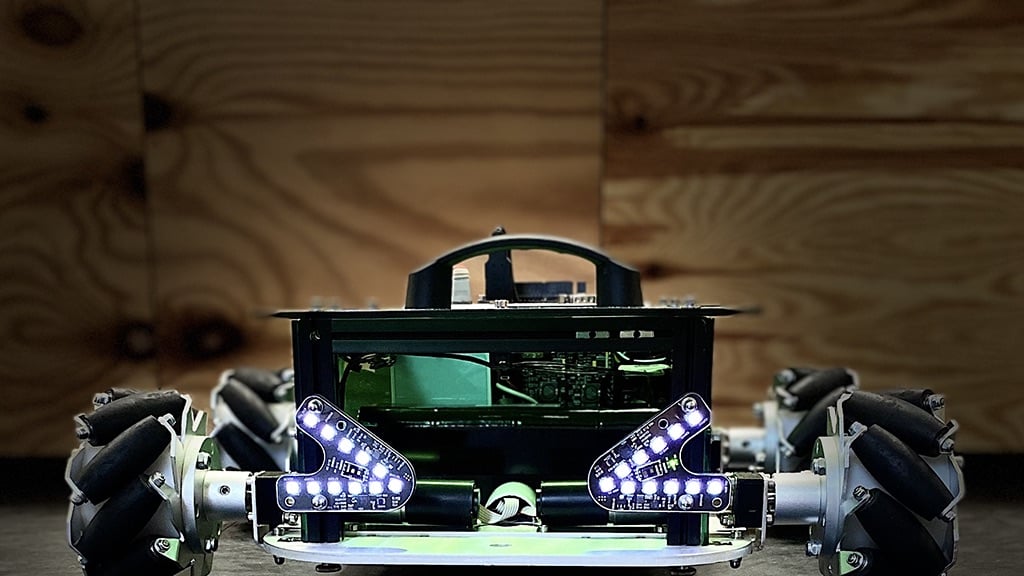
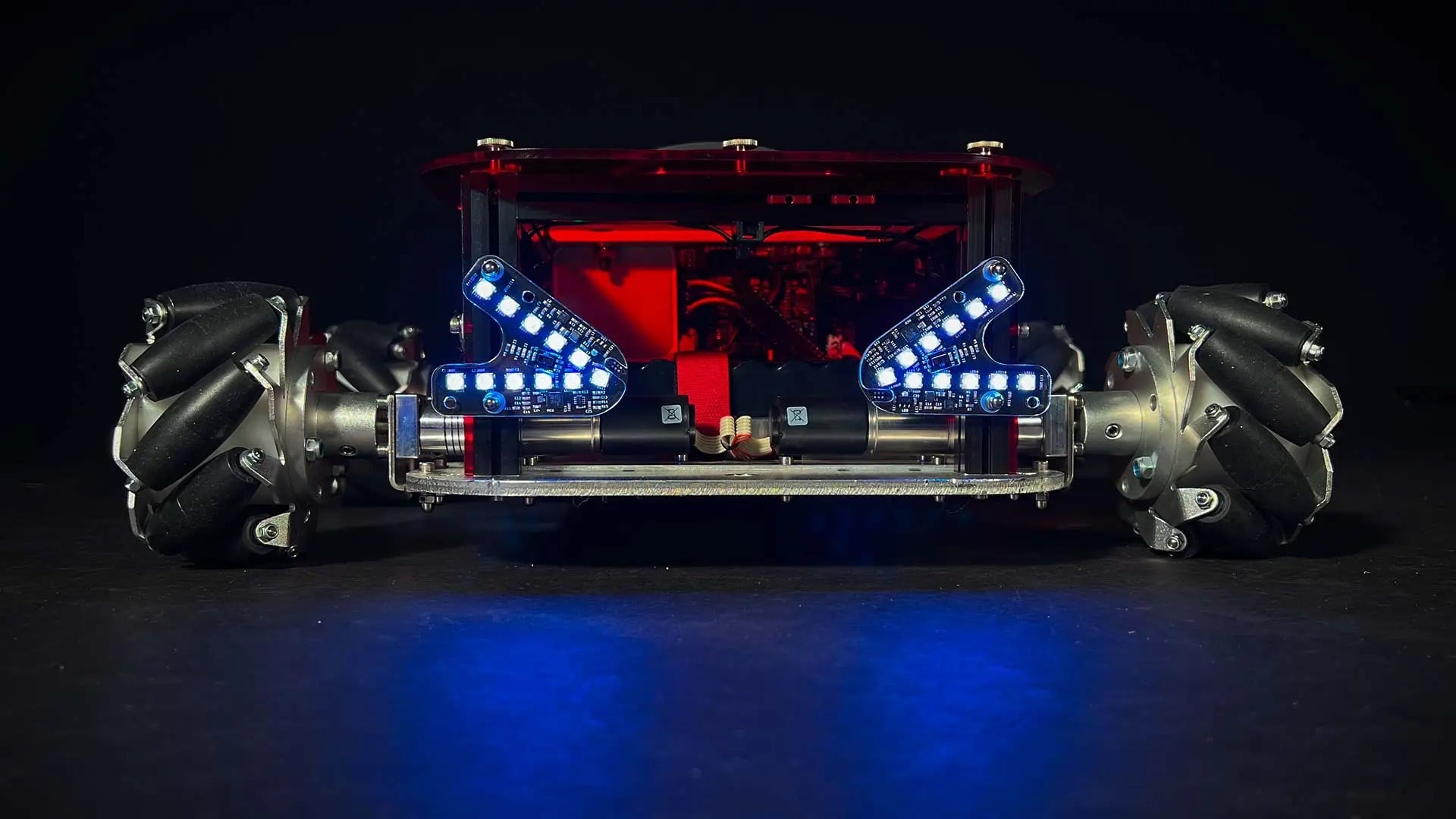
Mecanum wheels offer precise lateral movement, making them ideal for
indoor use where maneuverability in tight spaces is key. However,
they provide less traction on loose or uneven surfaces, which make
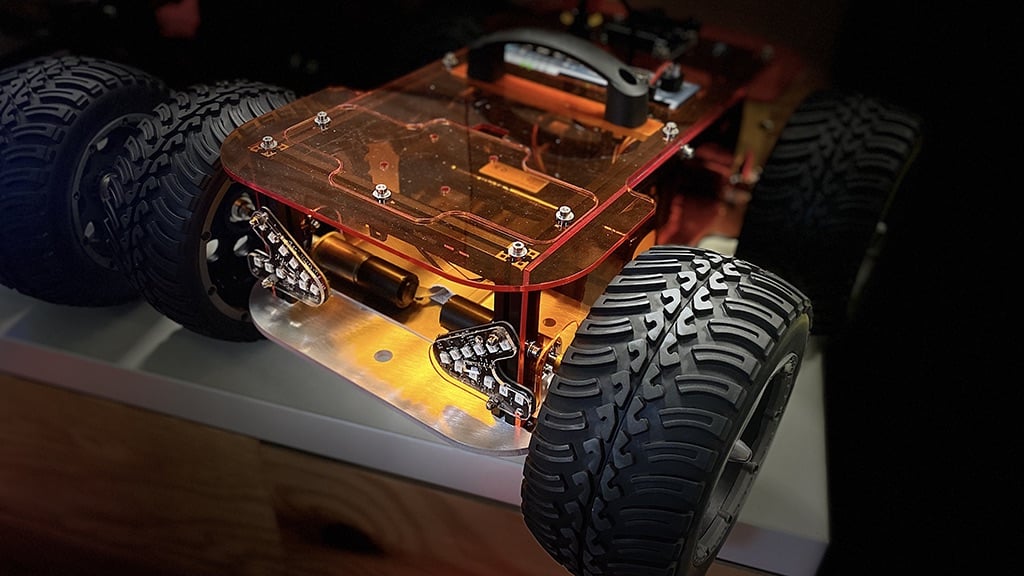
them less suitable for outdoor environments. For that, off-road
wheels are the better choice. Built for durability and grip, they
handle rough terrain like gravel, grass, or uneven ground with ease.
While they don’t allow the same precise, multidirectional movement
as Mecanum wheels and have a slightly larger turning radius, they
excel in stability and traction.
With Eduard’s quick-change system, switching between these wheel
types takes only moments – giving you the flexibility to adapt your
robot to any situation.
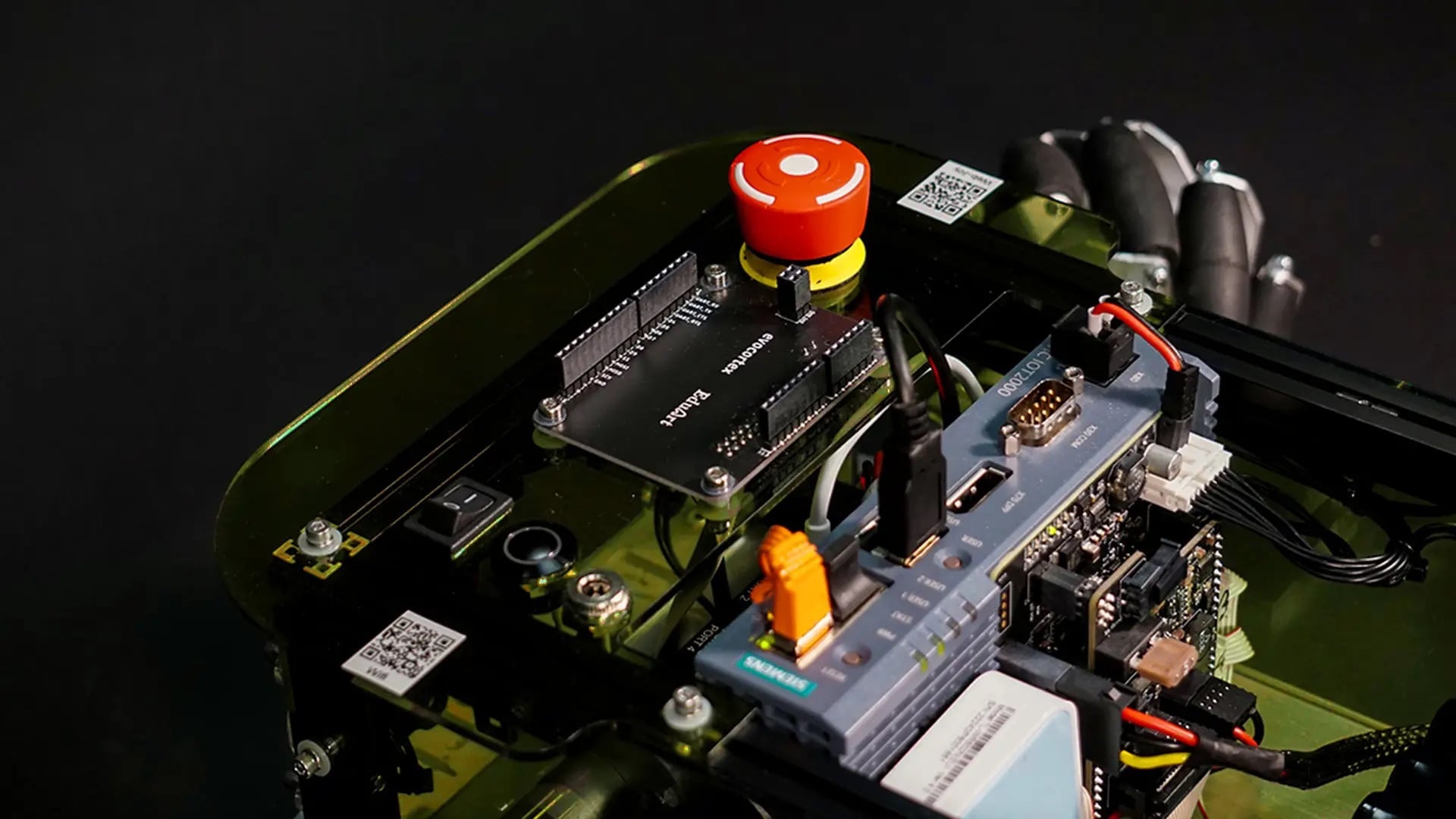
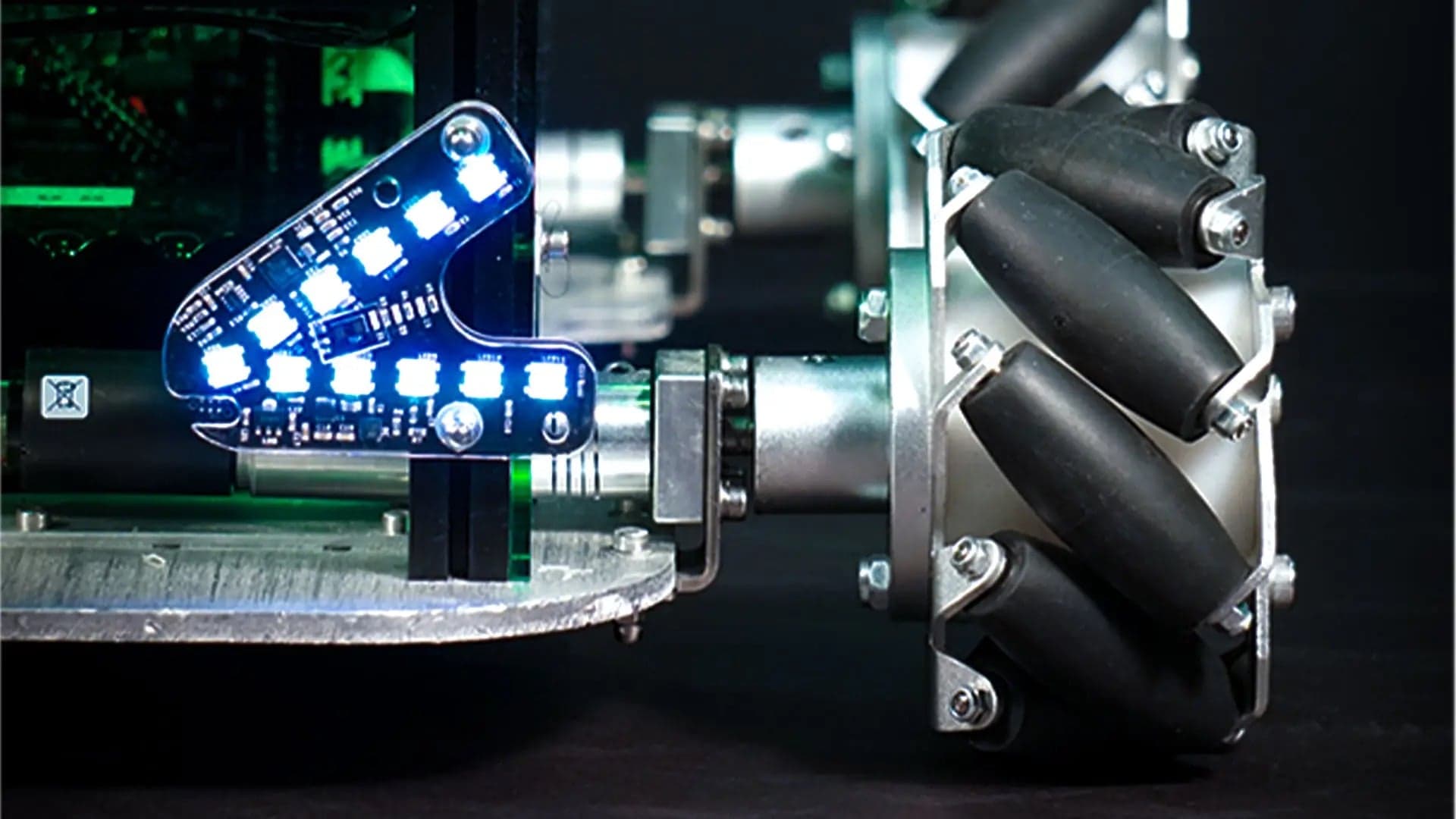
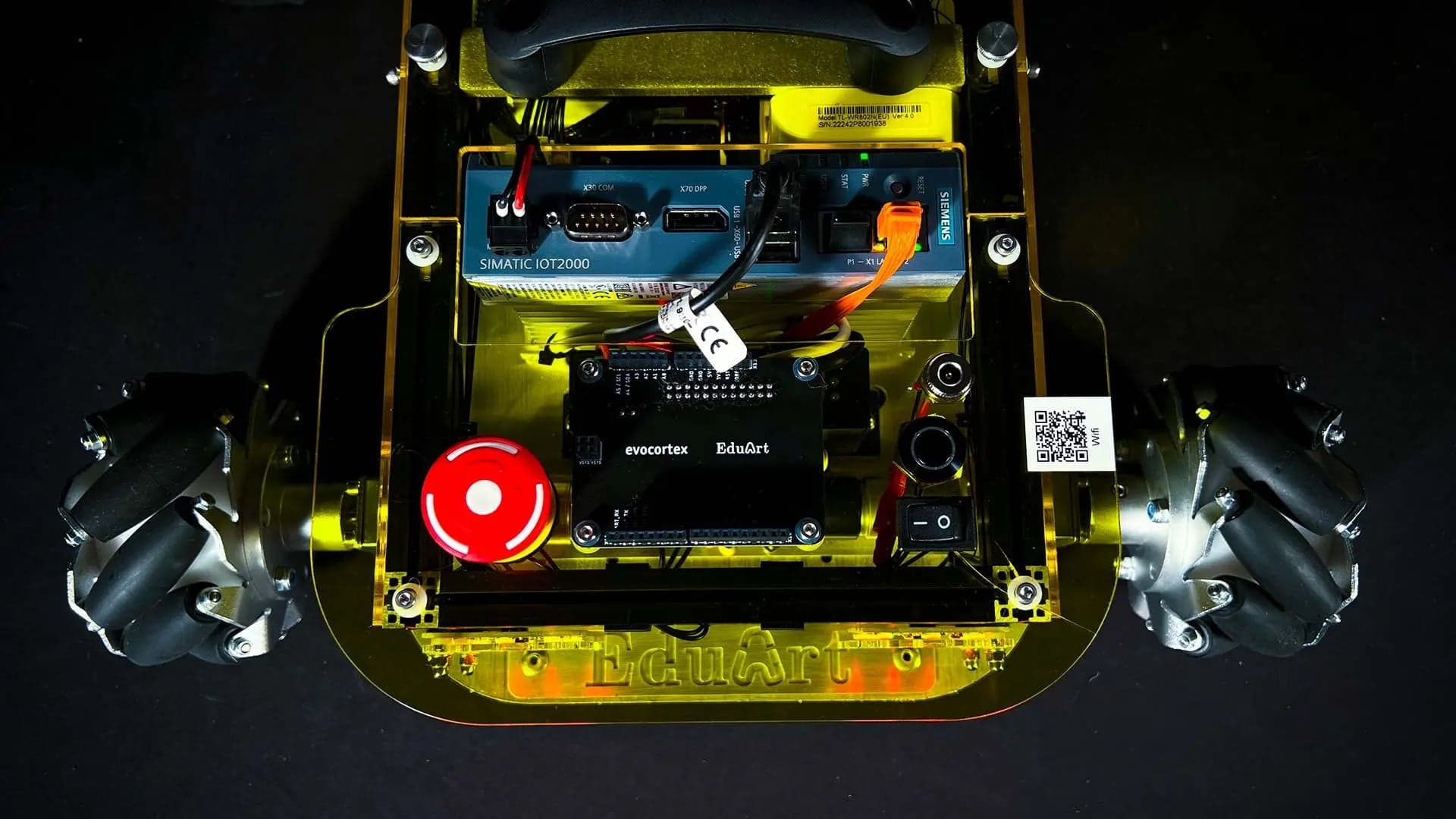
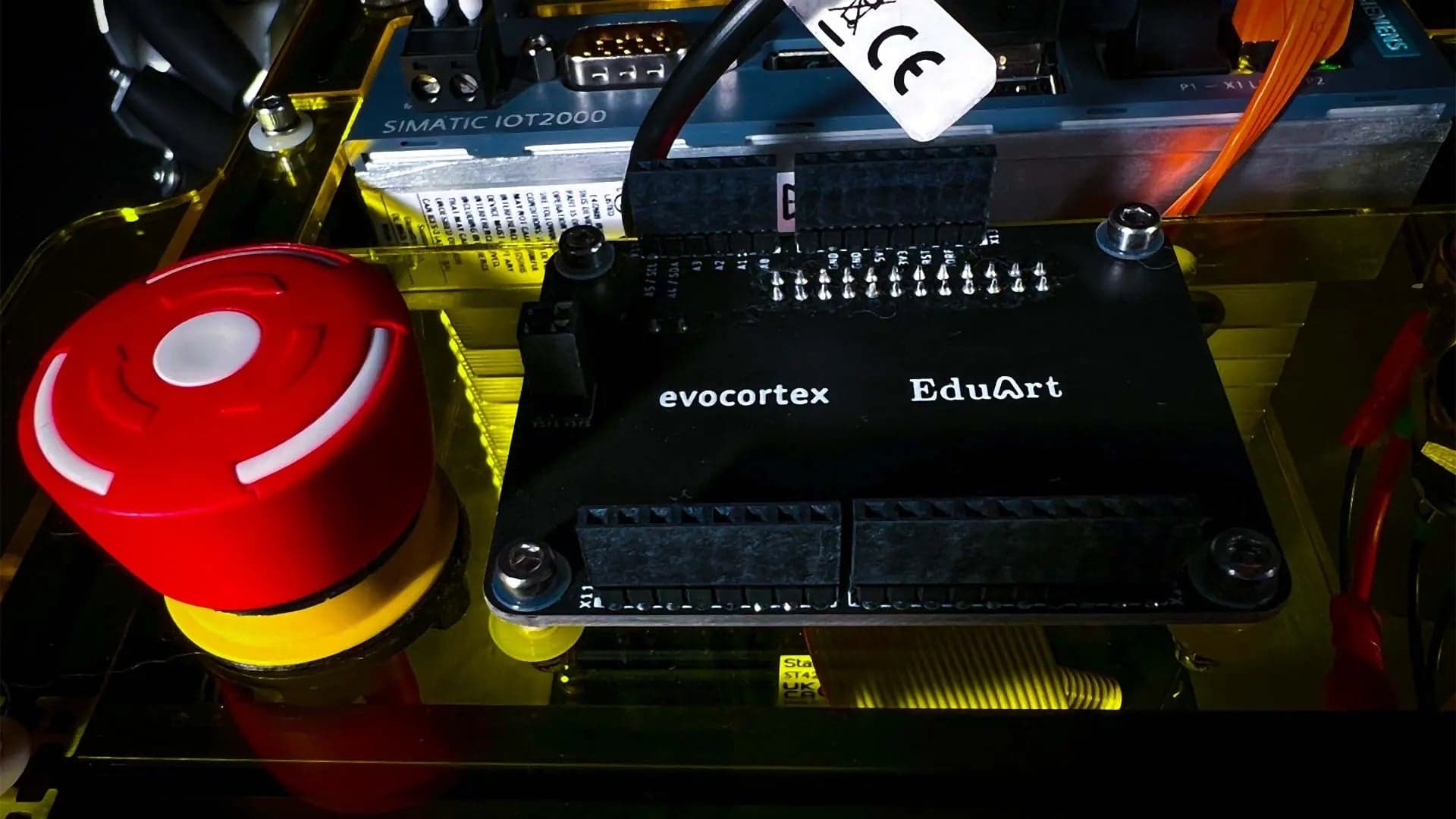
connectivity and programming options
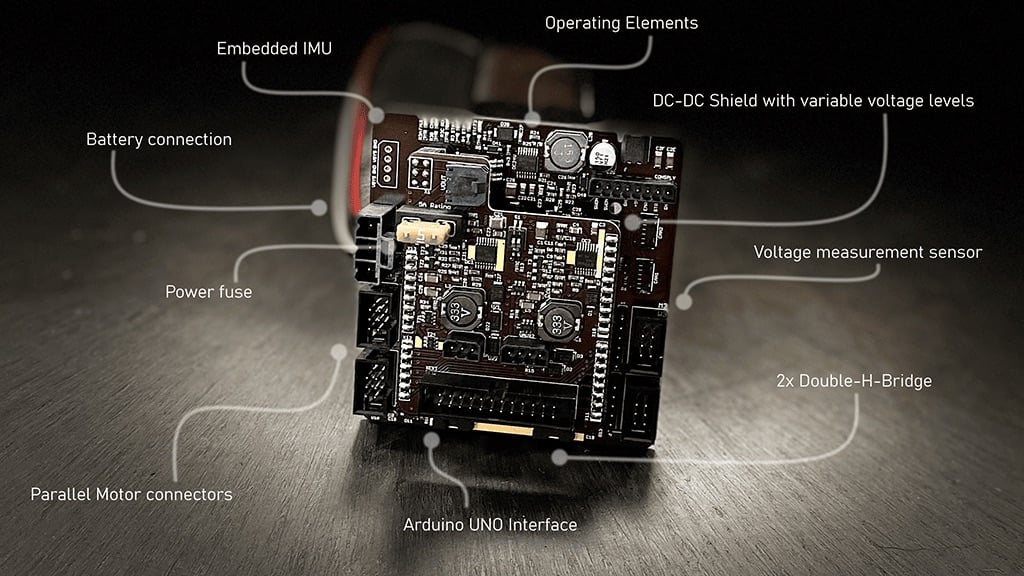
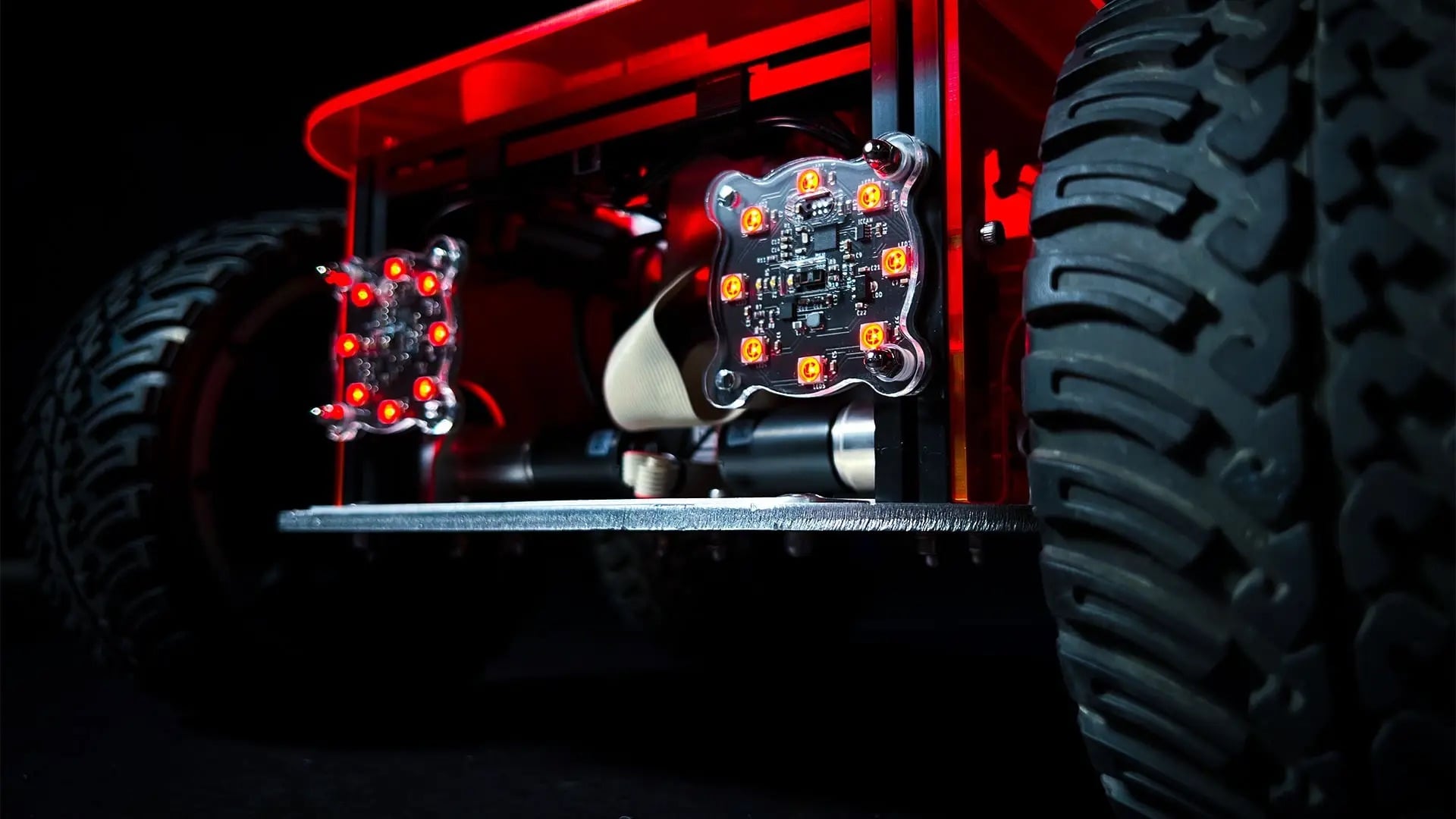
Eduard offers an exceptional level of connectivity and flexibility, making it easy to integrate nearly any hardware or accessory – whether it’s a robotic arm, internal front and rear lights, cameras, or custom sensors. With multiple communication interfaces including CAN bus, WiFi, GPIOs, USB, and Ethernet, there’s a reliable connection option for almost any device. Unlike many other robotics platforms, Eduard doesn’t limit you to a predefined set of peripherals – it’s designed to be future-proof and fully extensible. That means you don’t need to plan every hardware detail in advance; Eduard’s wide range of interfaces ensures you can adapt and expand as your projects evolve. On the software side, Eduard supports both beginners and advanced developers through its versatile R&D platform, featuring Node-RED, ROS1, ROS2, Python, C++, Docker, and a powerful simulation environment. Whether you’re experimenting or building complex systems, Eduard gives you the freedom and tools to communicate, control, and innovate – now and in the future.
CAN
Communicate with Eduard via CAN bus.
WiFi
Program your Eduard using internal WiFi.
GPIOs
Attach components to Eduard using the GPIO pins.
USB
Link peripherals to Eduard through the USB interface.
Ethernet
Connect devices to Eduard using the Ethernet port.